A country road and a blind bend ahead – what if there are road works behind the curve or a vehicle has broken down? Most motorists wish they could be warned, if there is a pontential hazardous situations ahead. Car-to-car communication technology aims address this issue by ensuring vehicles are warned or warn the other traffic in potential dangerous situations, even allowing cars to react automatically. Nearly every OEM in the Automotive sector works on this technology.
Even though vehicle manufacturers have agreed on standards and specifications for communication between vehicles spanning all brands, Car-2-Car technology still lacks a reliable, reproducible automated test methodology. Potential weaknesses and malfunctions have to be detected and resolved in the test lab, before the new technology can be deployed in the field.
Adapting QPER to the needs of Ad-hoc networks in Car-2-Car Communication
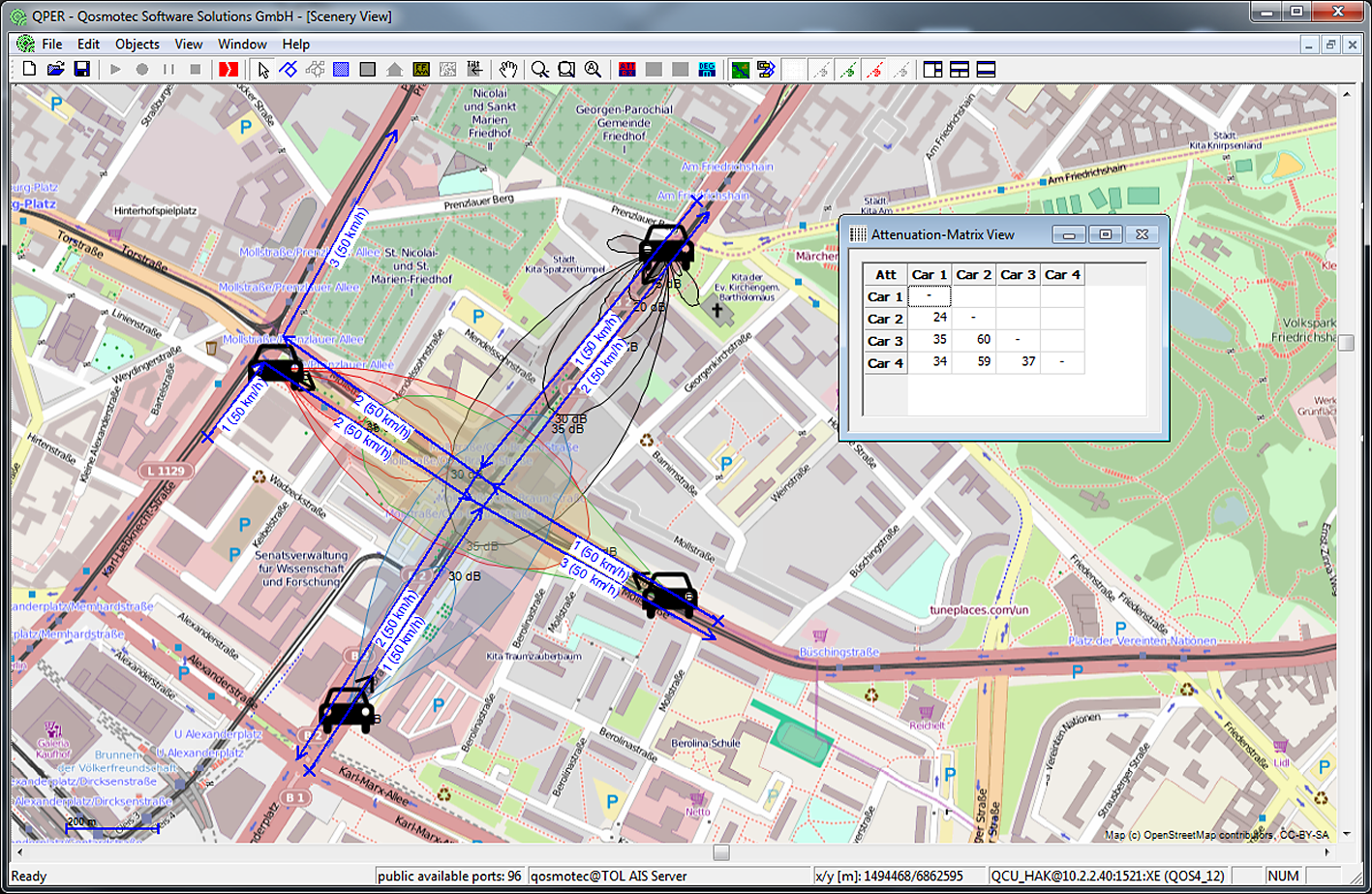
Arbitrary traffic scenarios can be created with a few drag & drop actions. Radiation patterns are taken into account for calculating the signal strength between vehicles and setting them on the attenuators.
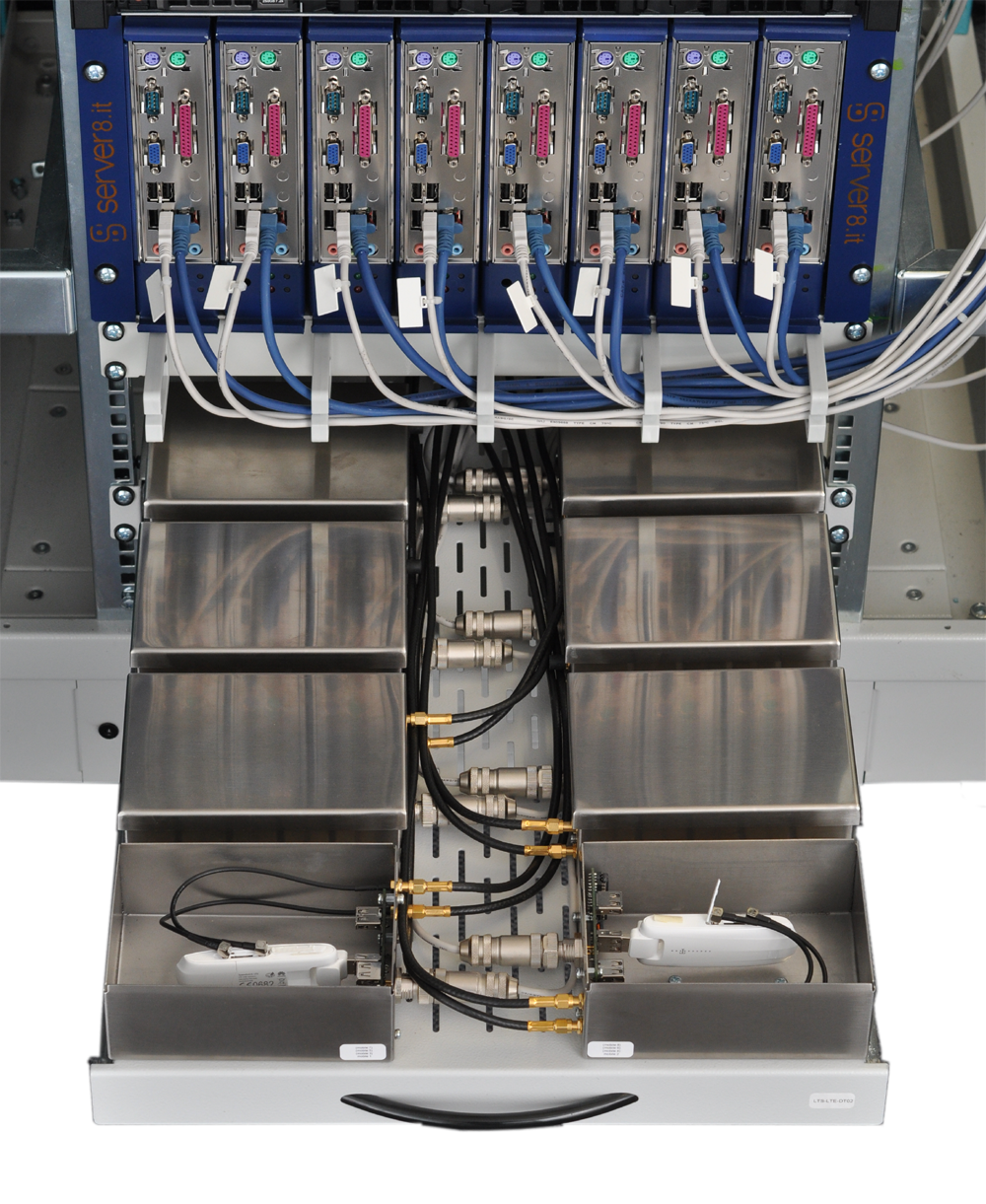
Qosmotec aims to solve this issue. Together with RWTH Aachen Universtity and Vector Informatik we develop a signal strength emulator for hardware-in-the-loop (HIL) test facilities in the automotive industry. This poses a challenge, because public mobile networks and Car-2-Car technology have different parameters. “In Car-2-Car communication we are dealing with Ad-hoc networks”, explains Qosmotec’s Managing Director Mark Hakim. “This means there is no distinction between fixed base stations and mobile subscribers. All devices communicate directly with each other while they are moving. They also assume different roles, e.g., message broadcaster, router or mobile receiver.” For this ad-hoc network emulation, a new hardware setup had to be developed with configurable radio links between all network participants. Currently Qosmotec works on traffic and channel models that simulate driver behavior and resulting radio propagation impacts on the communication channel.
Qosmotec co-operates with the Institute for Theoretical Information Technology at RWTH Aachen University. They focus on propagation models based on real building environments, based on an approach derived from ray tracing. “This allows predicting signal propagation for drive tests through actual streets. A huge step for Car-2-X technology, as conducting virtual drive tests in the lab keeps the required resources to a reasonable amount,” says Mark Hakim.
Joining CANoe.Car2X and QPER to provide reproducible drive tests for Car-2-Car Technology
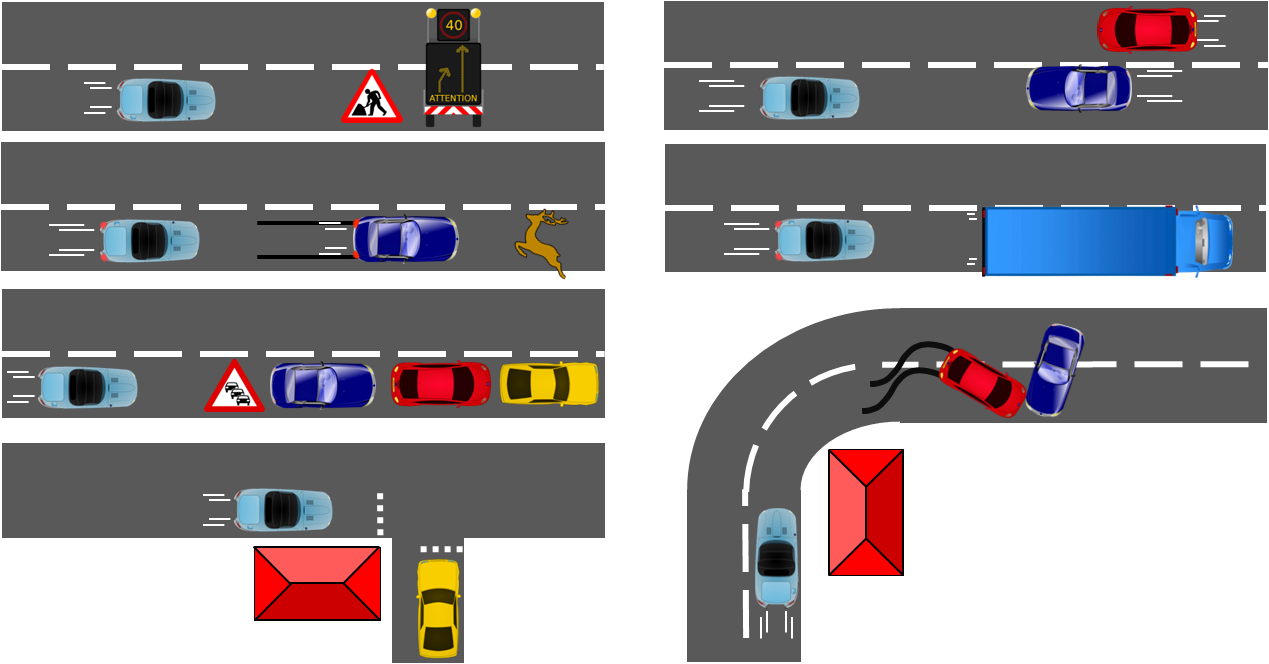
Day-One applications for Car-2-X communication: Improving saftey by warning the driver in case of critical situations, e.g. roadworks, emergency breaks, traffic jams, crossings, approaching or slow vehicles and obstacles. All these situations can easily be created in the lab with virtual drive test software.
Besides propagation models, there is another challenge: “Our approach is based on our propagation effects replicator QPER which is designed to model the air interface but not to control the wireless equipment involved”. Here, Vector comes into play. Its widely-used software CANoe to develop, test and analyze electronic control units (ECU) has been extended by a new component CANoe.Car2X. It can handle the WLAN 802.11p protocol and the ETSI specified messages for cooperative awareness and decentralized environment notification and allows controlling On-board Units (OBU) and Road-Side Units (RSU) as well as simulating them. Qosmotec and Vector have joint forces to combine their tools. GPS-Positions simulated in QPER are transmitted by CANoe to the EBUs involved. “By joining CANoe’s Car-2-X extension with the air interface simulator QPER, we provide the necessary test set-up to enable testers to run virtual drive tests in their lab”, says Hakim. Testers can emulate traffic and infrastructure, and model user behavior. Standard scenarios, like road works, slow traffic or crossroads with restricted visibility are supplied. This enables engineers to check whether the technology reacts as required and brings Car-2-Car technology a step closer to market. First results of this joint development will be presented at the Car-to-Car Forum that is taking place in the town hall of Braunschweig on October 22nd / 23rd 2014.